sa 2024/01/23
669
Ang kumpletong gabay sa mga drive ng motor at marami pa
Ang isang driver ng motor ay isang elektronikong aparato na nagko -convert ng elektrikal na enerhiya sa mekanikal na enerhiya.Samakatuwid, pinapayagan ka ng mga drive ng motor na gumamit ng koryente para sa awtomatikong trabaho.Kung ang iyong proyekto ay nangangailangan ng paggamit ng mga driver ng motor, kung gayon ang pag -unawa sa mga driver ng motor ay makakatulong na protektahan ang iyong proyekto.Ang artikulong ito ay makakatulong sa iyo na maunawaan kung paano gumagana ang mga drive ng motor, ang kanilang mga tampok, uri, at ang mga pangunahing sangkap na kasangkot sa pagkonekta sa kanila.
Driver ng motor
Ang isang driver ng motor, na totoo sa pangalan nito, ay isang advanced na aparato na ginawa para sa tumpak na kontrol ng operasyon ng isang motor.Nagsisilbi itong isang mahalagang interface, na nag -uugnay sa motor sa microcontroller.Ang mga motor, lalo na ang mga mataas na kapangyarihan, ay humihiling ng mga boltahe na umaakyat sa daan -daang mga volts at malaking alon para sa operasyon.Sa kabaligtaran, ang mga microcontroller ay karaniwang namamahala lamang ng mga mababang boltahe, mula 5 hanggang 12 volts, na may mga alon lamang daan -daang milliamp.Ang isang direktang koneksyon sa pagitan ng isang motor at isang microcontroller, wala sa intermediate na kagamitan, mga panganib na labis na karga o sumisira sa huli.
Ang mga driver ng motor ay higit pa sa mga konektor;Mahalaga ang mga ito para sa boltahe at kasalukuyang pagbabagong -anyo.Binibigyan nila ng kapangyarihan ang mga microcontroller upang tumpak na manipulahin ang bilis, direksyon, at metalikang kuwintas.Dalhin, halimbawa, mga robotic arm o electric na sasakyan;Ang kanilang katumpakan ng pagganap, isang kritikal na aspeto, ay nakasalalay sa kontrol na ito.
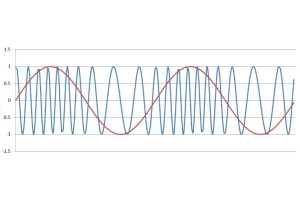
Sa kanilang pangunahing, ang mga driver ng motor ay binubuo ng mga sangkap na elektronikong sangkap - mga transistor at diode.Nakikipagtulungan sila upang baguhin ang kasalukuyang sa motor.Kadalasan, ang mga sangkap na ito ay nakaayos sa isang pagsasaayos ng H-tulay.Ang disenyo na ito ay nagbibigay -daan sa bidirectional kasalukuyang daloy, na nagpapahintulot sa mga motor na paikutin ang pasulong at paatras.Ang control ay nakamit sa pamamagitan ng isang signal ng PWM (Pulse Width Modulation).Ang signal na ito, na nagmula sa isang microcontroller, ay nag -aayos ng bilis ng motor sa pamamagitan ng pagbabago ng lapad ng pulso, sa gayon ay kinokontrol ang average na kasalukuyang sa motor.
Sa merkado, ang mga driver ng motor na nakararami ay nagpapakita bilang Integrated Circuits (ICS).Ang mga IC na ito ay sumasama sa lahat ng kinakailangang mga elektronikong sangkap at madalas na ipinagmamalaki ang mga karagdagang tampok tulad ng labis na proteksyon, proteksyon ng thermal, at regulasyon ng boltahe.Tinitiyak ng mga pangangalaga na ito ang pangkalahatang katatagan at seguridad ng system.Ang pagpili ng mga drive na ito ay batay sa uri ng motor - maging DC, stepper, o servo motor - at ang konteksto ng aplikasyon, na sumasaklaw sa pang -industriya na automation sa mga elektronikong consumer.
Ang pagpili ng isang naaangkop na driver ng motor ay nagsasangkot ng isang nuanced na pagsusuri ng iba't ibang mga elemento ng pivotal, na hinihingi ang isang malalim na pag -unawa na walang putol na nakahanay sa mga tiyak na hinihiling ng isang naibigay na aplikasyon.Ang magkakaibang katangian ng mga uri ng motor ay nangangailangan ng dalubhasang drive, na ginagawang isang pagsasaalang -alang ang pagiging tugma.Halimbawa, ang direktang kasalukuyang mga driver ng motor (DC motor) ay nagpapakita ng katapangan sa paghawak ng mga matatag na alon at boltahe, habang ang mga driver ng stepper motor ay nag -uutos ng masalimuot na pagsubaybay sa mga hakbang sa pag -ikot ng motor.Sa matalim na kaibahan, ang mga drive ng motor ng servo ay ipinagmamalaki ang masalimuot na mga katangian tulad ng closed-loop control, tinitiyak ang katumpakan sa posisyon at bilis ng regulasyon.
Ang isa pang kritikal na aspeto ay ang likas na kalikasan ng interface.Maraming mga driver ng motor ang maingat na ginawa upang walang putol na pagsamahin sa mga kilalang board ng microcontroller, tulad ng Arduino, na nagtatampok ng mga karaniwang interface ng digital o analog input.Ang mga interface na ito ay nagbibigay kapangyarihan sa microcontroller upang pamahalaan ang mga operasyon ng motor sa pamamagitan ng mga tahasang direktiba.Nagmamaneho ng mga wireless na kakayahan, na sumasaklaw sa mga module ng Bluetooth o Wi-Fi, ang mga proyekto na nangangailangan ng remote control o pagsasama sa mga matalinong sistema ng bahay.Ang wireless na koneksyon ay nagpapadali sa pagtanggap ng mga utos mula sa mga smartphone app o remote server.
Ang boltahe at kasalukuyang pagiging tugma ay lumitaw bilang mga kinakailangang pagsasaalang -alang kapag nagkakasundo sa isang drive ng motor na may isang tiyak na motor at ang aplikasyon nito.Ang drive ay dapat na pinamamahalaan ang pinakamataas na kasalukuyang at mga hinihiling na boltahe, na nagpapagaan sa peligro ng labis na labis o pagganap ng suboptimal na motor.Bilang karagdagan, ang mga aplikasyon na hinihingi ang pagganap ng rurok ay maaaring mangailangan ng mga driver na pinagkalooban ng mga advanced na tampok ng pamamahala ng kuryente, na sumasaklaw sa kasalukuyang paglilimita, proteksyon ng thermal, at regulasyon ng boltahe.Ang mga tampok na ito ay tiyakin ang kaligtasan at katatagan sa iba't ibang mga kondisyon ng pagpapatakbo.
Sa mga praktikal na sitwasyon, lampas sa mga pangunahing katangian na ito, ang mga variable tulad ng laki, kahusayan, mga kakayahan sa paglamig, at gastos ay maaaring magkaroon ng impluwensya, nakasalalay sa saklaw ng proyekto.Ang mga masusing pagsasaalang -alang na ito ay sama -samang naglalaro ng isang mahalagang papel sa pagpili ng isang driver ng motor na hindi nakikinig na nakahanay sa natatanging mga pangangailangan ng isang naibigay na proyekto.
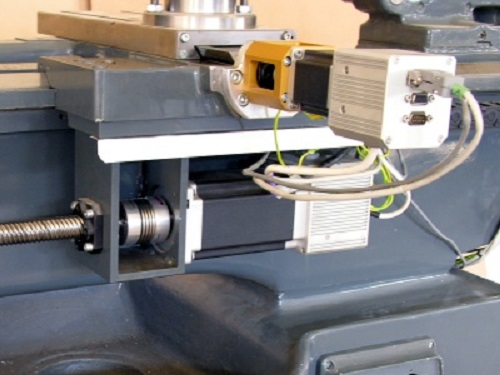
Ang motor, hindi maikakaila ang puso ng sistema ng pagmamaneho ng motor, ay kritikal sa mga aplikasyon na hinihingi ang katumpakan, tulad ng mga robotics at kagamitan sa paggawa ng katumpakan.Ang mga motor ng Servo, na kilala sa kanilang mataas na katumpakan na kontrol sa posisyon, bilis, at pagbilis, ay karaniwang ginagamit sa mga patlang na ito.Sa kaibahan, ang direktang kasalukuyang motor (DC motor), lalo na ang mga walang brush na DC motor (BLDC), ay pinapaboran sa mga aplikasyon na nangangailangan ng patuloy na pag -ikot, tulad ng mga tool ng kuryente at tagahanga.
Ang magsusupil, na gumagana bilang utak ng system, karaniwang binubuo ng isang microcontroller o microprocessor.Dapat itong responsibilidad ng pagbibigay kahulugan sa mga signal ng pag -input - bilis, direksyon, mga tagubilin sa posisyon - at naaayon, ay bumubuo ng mga utos na patnubayan ang motor.Sa mas sopistikadong mga pag-setup, ang mga dalubhasang controller ng paggalaw ay nagsasagawa ng mga kumplikadong algorithm, tulad ng kontrol ng PID (proporsyonal-integral-derivative control), pagpapahusay ng katumpakan ng control control.
Ang motor drive circuit ay gumaganap ng isang mahalagang papel sa parehong servo motor at DC motor system, na kumikilos bilang isang kasalukuyang amplifier.Pinalalaki nito ang signal ng output ng microcontroller sa isang antas na sapat na sapat upang himukin ang motor.Ang circuitry na ito, na madalas na kinasasangkutan ng H-bridges, MOSFETS, at transistors, ay sanay sa pamamahala ng mga load na may mataas na kapangyarihan at modulate na direksyon at bilis ng motor.
Ang yunit ng supply ng kuryente, na nagbibigay ng mahahalagang kapangyarihan sa parehong motor at controller, makabuluhang nakakaimpluwensya sa pagganap ng system.Ang katatagan at kahusayan nito ay pinakamahalaga.Ang pagpili ng supply ng kuryente ay nakasalalay sa kalakhan sa uri ng motor at mga kinakailangan sa kapangyarihan;Halimbawa, ang mga motor ng servo ay maaaring mangailangan ng alternating kasalukuyang (AC), habang ang mga motor ng DC ay nangangailangan ng direktang kasalukuyang (DC).
Ang mga koneksyon at interface ay nagsisiguro ng tumpak na paghahatid ng signal at mahusay na daloy ng enerhiya sa pagitan ng mga motor, mga controller, drive circuit, at mga suplay ng kuryente.Bilang karagdagan, ang mga sistemang ito ay madalas na nagsasama sa mga panlabas na aparato tulad ng mga sensor, pagpapakita, o mga interface ng remote control para sa pinahusay na pag -andar.
Sa wakas, ang mga advanced na sistema ng pagmamaneho ng motor ay maaaring isama ang mga karagdagang sangkap tulad ng mga sensor (posisyon at bilis), mga sistema ng paglamig (mga radiator o tagahanga), at mga proteksiyon na elemento (labis na pag -init at sobrang pag -init ng proteksyon).Ang mga karagdagan na ito ay makabuluhang itaas ang katumpakan, katatagan, at kaligtasan ng sistema ng drive.
Mga Application ng Motor Drive
Sa malawak na domain ng propulsion ng motor, ang pagtukoy ng elemento ay namamalagi sa masalimuot na mga mekanismo ng kontrol at ang partikular na mga motor na kinukuha ng bawat variant.Tahuhin natin ang ilang mga kapansin -pansin na paglihis:
Ang Direct Electric Current Motor (DC Motor) ay nag -mamaneho: naayon para sa paggamit ng mga DC motor, na sumasaklaw sa mga walang brush na DC motor (BLDC), ang mga sistemang propulsion na ito ay nakamit ang pangunahing kontrol ng bilis sa pamamagitan ng modyul ng boltahe o modyul na lapad ng pulso (PWM).Ang isang halimbawa ay ang L293, isang malawak na ginamit na driver ng motor ng DC na may kasanayan sa pangangasiwa ng direksyon at bilis ng dalawang motor nang sabay -sabay.
Stepper Motor Driver: Ang driver na ito ay higit sa maayos na pag -aayos ng haba ng hakbang ng isang stepper motor, tinitiyak ang masusing posisyon at kontrol ng bilis.Ito ay gumana sa pamamagitan ng pagdidirekta ng alternating kasalukuyang sa pagitan ng mga phase ng motor, na gumagabay sa bawat hakbang ng motor ng stepper.
Servo Motor Drives: Kinilala para sa kanilang agarang tugon sa bilis, posisyon, at kontrol ng pagpabilis, ang mga sistemang propulsion na ito ay madalas na gumagamit ng isang closed-loop control system.Masigasig nilang mapaunlakan ang mga pagkakaiba-iba sa posisyon at bilis, na nagpapagana ng kontrol sa paggalaw ng mataas na katumpakan.Ang Servo drive ay naglalaro ng isang mahalagang papel sa mga robotics, awtomatikong makinarya, at paggawa ng katumpakan.
Tukoy na Pinagsamang Circuit (IC) Mga driver: Pag -stream ng pagsasama sa mga microcontroller, ang mga driver na ito ay nag -aalok ng mga tampok tulad ng overcurrent protection at fault diagnostics.Ang isang nakalarawan na halimbawa ay ang DRV8833, isang meticulously crafted IC driver para sa pagkontrol ng maliit na DC o stepper motor.
Mataas na lakas na drive ng motor: Naayon upang matugunan ang malaking kasalukuyang at mga hinihingi ng boltahe ng mga malalaking motor, ang mga sistemang propulsion na ito ay angkop sa mga aplikasyon na hinihingi ang matatag na output ng kuryente, tulad ng mga de-koryenteng sasakyan o napakalaking pang-industriya na makinarya.Ginagamit nila ang nababaluktot na mga elektronikong sangkap tulad ng mga IGBT (insulated gate bipolar transistors) at high-power mOsfets.
Programmable Motor Driver: Kabaligtaran sa nabanggit na mga uri, ang driver na ito ay nagbibigay ng isang napapasadyang interface para sa mga gumagamit upang makontrol ang mga parameter ng control.Ito ay tumutukoy sa mga tiyak na pangangailangan ng kontrol batay sa mga kinakailangan sa proyekto, na ginagawang apt para sa masalimuot na mga aplikasyon sa mga proyekto ng automation engineering at R&D.
Ang paggalugad na ito sa propulsion ng motor ay nagpapakita ng kanilang pagkakaiba -iba at dalubhasang mga aplikasyon.Ang bawat uri ay nagdudulot ng isang natatanging hanay ng mga kakayahan sa talahanayan, pagtugon sa masalimuot na mga pangangailangan ng iba't ibang mga industriya at proyekto.
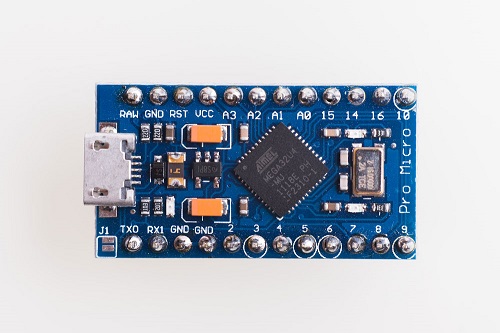
motor drive
Sa gitna ng bawat pag -andar ng motor ay isang microcontroller o microprocessor, na kumikilos bilang talino ng teknolohiya sa kabuuan.Ang mga matalinong aparato ay maaaring makagawa ng mga signal ng control mula sa mga tagubilin sa programa o input ng gumagamit kabilang ang bilis, direksyon at posisyon.Sa isang senaryo ng automation, pagkatapos matanggap ang data ng sensor, ang controller ay bumubuo ng mga tagubilin upang gabayan ang motor upang mapatakbo.
Ang mga microcontroller's low-power digital signal ay na-convert sa driver ng motor sa isang high-power output na pinasadya para sa pakikipag-ugnayan sa motor.Ang paglipat na ito ay karaniwang ipinatutupad sa mga mekanismo tulad ng mga H-Bridge circuit o kumplikadong mga mosfets ng kapangyarihan.
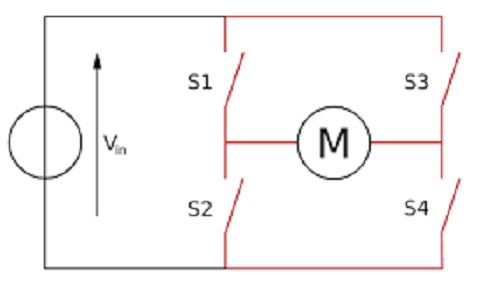
Ang H-Bridge circuit ay isang pangunahing sangkap sa mga drive ng motor, lalo na ang DC motor drive.Binubuo ito ng apat na switch (karaniwang mga transistor) sa isang "H" -shaped na istraktura, na maaaring baguhin ang kasalukuyang direksyon ng daloy ng motor at sa gayon ay kontrolin ang direksyon ng motor.Kasabay nito, ang modulation ng mga switch na ito ay isinasagawa sa pamamagitan ng tumpak na teknolohiya ng PWM, na nagpapagana ng pinong kontrol ng bilis ng motor.
Ipasok ang Pulse-Width Modulation (PWM), isang taktikal na conductor na kumokontrol sa average na kasalukuyang sa isang motor sa pamamagitan ng cleverly na pagmamanipula ng kapangyarihan sa loob ng isang H-tulay na circuit.Bilang karagdagan sa pag -aayos lamang ng boltahe ng supply, pinapayagan ng PWM ang microcontroller na sopistikado na pamahalaan ang bilis ng motor.
Inihayag ng malapit na inspeksyon na may mga pin ng input at kontrolin ang lohika sa loob ng driver ng motor, na may bawat pin na naatasan sa pagtanggap ng ibang signal ng kontrol mula sa magsusupil.Ang mga pin na ito ay may pananagutan para sa pag -coordinate ng mga pag -andar tulad ng Motor Start/Stop, Direction Control, at Speed Regulation, na nagiging mga tool para sa panloob na logic circuit ng drive upang bigyang -kahulugan ang mga signal at i -convert ang mga ito sa maingat na naisakatuparan na mga operasyon sa kontrol ng motor.
Sa mundo ng mga kumplikadong sistema ng pagmamaneho ng motor, ang mga sensor ay nagiging tahimik na mga tagamasid - pagsukat sa posisyon, bilis o kasalukuyang - upang suriin ang katayuan ng motor.Ang mayamang data na ito ay bumubuo ng batayan ng control ng closed-loop, na tinitiyak ang operasyon ng motor na sumusunod sa mga paunang natukoy na mga parameter.Bilang isang panukalang proteksiyon, isang hanay ng mga tampok ng kaligtasan, kabilang ang labis na karga, sobrang pag -init at proteksyon ng anomalya ng boltahe, protektahan ang mga motor at kumplikadong mga circuit.
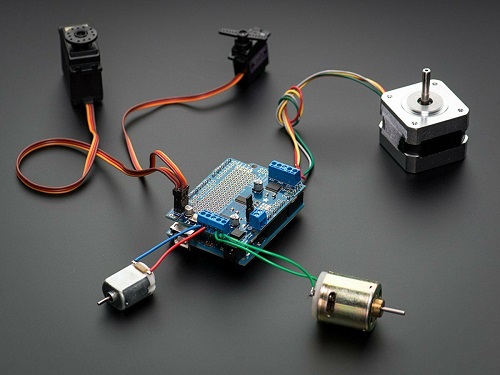
Bahagi ng Arduino Project
Ang pagsasama ng isang tagapamagitan na driver ng motor sa pagitan ng microcontroller at ang motor ay lumitaw bilang isang pivotal na pagsasagawa, lalo na dahil sa kaibahan ng kanilang boltahe at kasalukuyang mga hinihiling.Ang mga microcontroller ay karaniwang nagpapatakbo sa mga nababawas na boltahe (hal.maraming amps o higit pa).
Ang direktang koneksyon sa pagitan ng motor at ng microcontroller ay nagdadala ng likas na panganib ng labis na karga at potensyal na pinsala.Dahil dito, ipinapalagay ng driver ng motor ang mahalagang papel ng isang daluyan ng conversion, marunong magbago ng mga signal ng mababang kapangyarihan na nagmula sa microcontroller sa matatag na signal ng output na hinihiling ng motor.
Ang isang pangunahing pag -andar ng driver ng motor ay ang muling pagkakasundo ng mga disparage sa boltahe at kasalukuyang sa pagitan ng mga microcontroller at motor.Ang microcontroller, nasanay sa mga mababang boltahe at alon, ay nahahanap ang sarili sa isang stark dichotomy na may mga kinakailangan ng motor.Ang driver ng motor ay kumikilos bilang isang pivotal intermediary, mapanlikha na nagpapadala ng microcontroller's low-power signal sa mataas na lakas na output na mahalaga para sa motor, na nagpapagaan ng mga latent na panganib ng labis na karga at pinsala.
Bukod dito, ang mga driver ng motor ay gumagamit ng malaking impluwensya sa pagpapahusay ng control katumpakan sa iba't ibang mga sukat tulad ng bilis, direksyon, at pagbilis.Ang katumpakan na ito ay ipinapalagay ang pinakamahalagang kabuluhan sa mga aplikasyon na hinihingi ang masusing kontrol sa paggalaw, kabilang ang ngunit hindi limitado sa mga robotic arm, awtomatikong makinarya, at mga sistema ng pagpoposisyon ng katumpakan.
Ang isa pang kaharian kung saan iginiit ng mga driver ng motor ang kanilang kabuluhan ay namamalagi sa pag -iingat sa mga microcontroller.Ang mga motor ay may propensidad upang makabuo ng hindi kanais -nais na mga spike ng boltahe o reverse currents sa panahon ng pagsisimula o pagtigil, na nagdudulot ng isang napipintong banta sa mga microcontroller.Ang mga drive ng motor ay madalas na nagtatampok ng proteksiyon na circuitry, na sumasaklaw sa paghihiwalay, overvoltage, at labis na mga pag -iingat, na nagtutayo ng isang mabigat na pagtatanggol laban sa mga potensyal na nakapipinsalang signal at pinapanatili ang integridad ng microcontroller.
Ang kahusayan ng enerhiya ay tumatagal ng entablado sa gitna, lalo na sa mga drive ng motor na gumagamit ng teknolohiyang modulation ng Pulse Width (PWM).Ang mga ito ay nagtutulak na magkakasundo ang pagkonsumo ng kuryente ng mga motor na may higit na kahusayan, na hindi lamang nakakatipid ng enerhiya ngunit binabawasan din ang panganib ng pinsala sa motor dahil sa sobrang pag -init.Ang mga driver ng motor ay may iba't ibang mga tampok ng interface na nagpapasimple ng koneksyon sa isang malawak na hanay ng mga microcontroller at panlabas na mga sistema ng kontrol.Kasama dito ang walang tahi na pagsasama sa mga computer, remote controller o iba pang mga aparato ng automation, na nagpapakita ng kakayahang magamit nito sa pagbagay sa mga kumplikadong sistema.
Ang isa pang aspeto na nakatayo ay ang pagkakaloob ng puna at pagsubaybay sa mga advanced na drive ng motor.Ang mga drive na ito ay karaniwang isinasama ang mga mekanismo ng feedback ng sensor para sa pagsubaybay sa real-time na katayuan ng motor, kabilang ang mga parameter tulad ng bilis, posisyon at temperatura.Ang feedback na ito ay integral sa mga closed-loop control system at tumutulong sa awtomatikong pag-tune at preemptive fault detection.
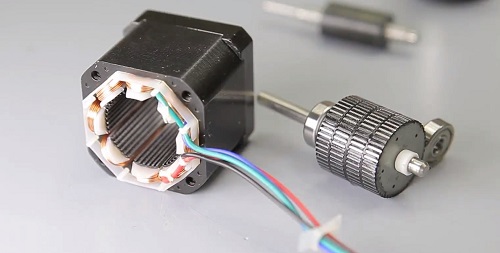
Servo motor close-up
Ang pagsasama ng isang driver ng motor sa pagitan ng isang microcontroller at isang motor ay lumitaw bilang isang mahalagang pangangailangan.Ang kahalagahan na ito ay bumangon hindi lamang mula sa madalas na hindi kapani -paniwala na boltahe at kasalukuyang mga kinakailangan ng dalawang sangkap kundi pati na rin mula sa multifaceted function na ipinapalagay ng driver ng motor sa loob ng system.
Boltahe at kasalukuyang pagkakaisa: Ang mga microcontroller ay karaniwang nagpapatakbo sa mga nabawasan na boltahe, tulad ng 3.3V o 5V, na may mga alon na sinusukat sa mga milliamp.Sa kaibahan, ang mga motor ay maaaring mangailangan ng nakataas na boltahe, kung minsan ay mula sa sampu -sampung hanggang daan -daang mga volts, at pinalaki na mga alon, na umaabot sa ilang mga amp o higit pa.Ang isang direktang ugnayan sa pagitan ng isang motor at isang microcontroller ay naglalagay ng isang peligro ng labis na karga at pagkasira sa huli.Dito, ang driver ng motor ay kumikilos bilang isang tagapamagitan, husay na nagpapadala ng mga signal ng mababang lakas ng microcontroller sa matatag na signal na angkop para sa operasyon ng motor.
Pinahusay na katumpakan ng kontrol: Ang mga drive ng motor ay mapadali ang mas detalyadong kontrol ng mga parameter tulad ng bilis, direksyon, at pagbilis.Ang detalyadong kakayahan ng control na ito ay kailangang -kailangan sa mga aplikasyon na nangangailangan ng kumplikadong kontrol sa paggalaw (tulad ng robotic arm, awtomatikong makinarya, o mga sistema ng pagpoposisyon ng katumpakan).
Ang pag -iingat sa microcontroller: Ang mga motor ay may propensidad upang makabuo ng hindi kanais -nais na mga spike ng boltahe o reverse currents, lalo na sa panahon ng pagsisimula o mga yugto ng pagtigil, na nagbabanta sa microcontroller.Ang mga driver ng motor ay madalas na isinasama ang proteksiyon na circuitry, na sumasaklaw sa paghihiwalay, overvoltage, at labis na proteksyon, upang protektahan ang microcontroller mula sa mga masamang epekto.
Pag -optimize ng pagkonsumo ng enerhiya: Mga drive ng motor, lalo na ang mga gamit na PWM (Pulse Width Modulation) na teknolohiya, excel sa pamamahala ng pagkonsumo ng kapangyarihan ng motor.Ito ay hindi lamang nagpapatibay ng kahusayan ng enerhiya ngunit din ang pagpapagaan ng peligro ng kapansanan sa motor dahil sa sobrang pag -init.
Pagkakaiba -iba sa Interface: Ang motor ay nagtutulak ng isang hanay ng mga interface, pagpapadali ng mga koneksyon sa magkakaibang mga microcontroller at panlabas na mga sistema ng kontrol tulad ng mga computer, remote controller, o iba pang mga aparatong automation.Ang kakayahang umangkop na ito ay ipinapalagay ang isang kardinal na papel sa pagsasama -sama ng mga masalimuot na sistema.
Feedback at Surveillance: Ang sopistikadong drive ng motor ay maaaring sumaklaw sa feedback ng sensor, pagpapagana ng pagsubaybay sa real-time na katayuan ng motor, na sumasaklaw sa bilis, posisyon, temperatura, at marami pa.
Ang nasabing puna ay nagpapatunay na kailangang-kailangan sa mga closed-loop control system, pag-aalaga ng awtomatikong pagsasaayos at pag-ambag sa pag-iwas sa kasalanan.
H-Bridge Circuit
Ang H-Bridge Circuit, isang pundasyon sa kontrol ng motor, ay ipinagmamalaki ang malawak na mga aplikasyon sa magkakaibang mga patlang.Ang pag -andar at spectrum ng aplikasyon ay maaaring galugarin tulad ng mga sumusunod:
Komposisyon: Ang isang tipikal na H-tulay ay binubuo ng apat na mga elemento ng paglilipat, madalas na mga transistor, na maaaring mga uri ng mOSFET o bipolar.Ang mga sangkap na ito ay madiskarteng nakaayos upang gayahin ang titik na "H," kasama ang motor na kumokonekta sa gitnang segment ng circuit.
Kontrol ng direksyon ng motor: binabago ng H-tulay ang kasalukuyang direksyon ng motor sa pamamagitan ng pag-iiba ng mga estado ng paglilipat ng mga transistor.Halimbawa, ang pag -activate ng dalawang transistor sa isang tabi ng circuit habang ang pag -deactivate ng kabaligtaran na pares ay nagpapahiwatig ng isang tiyak na kasalukuyang daloy, na umiikot ang motor sa isang direksyon.Ang pagbabalik sa kombinasyon ng transistor na ito ay nagiging sanhi ng pag -ikot ng motor.
Pag-aayos ng bilis: Higit pa sa kontrol ng direksyon, kinokontrol din ng H-Bridge ang bilis ng motor, higit sa lahat sa pamamagitan ng modyul na lapad ng pulso (PWM).Binabago ng PWM ang tagal ng kasalukuyang daloy (cycle ng tungkulin) sa isang mataas na dalas, pagkontrol sa average na kapangyarihan ng motor at dahil dito, ang bilis nito.
Saklaw ng Application: Ang tumpak na mga kakayahan ng kontrol ng H-Bridge Circuit ay angkop para sa iba't ibang mga aplikasyon.Ginagamit ito sa mga maliliit na motor na DC sa mga laruan at kasangkapan sa sambahayan at sa mas malaking pagsisikap tulad ng mga de-koryenteng sasakyan at mga sistema ng kontrol sa industriya.
Mga Pinagsamang driver: Nag-aalok ang merkado ng mga integrated driver ng H-Bridge, pinagsama-samang circuitry, control logic, at mga proteksiyon na pag-andar.Ang mga pinagsamang solusyon na ito ay nagpapagaan ng disenyo, mapahusay ang pagiging maaasahan, at madalas na isama ang mga tampok tulad ng labis na karga, proteksyon ng thermal, at pag -stabilize ng boltahe.
Mga Hamon sa Disenyo: Sa kabila ng pagiging epektibo nito, ang pagdidisenyo kasama ang mga hamon ng H-Bridges.Kasama dito ang pagtiyak ng mabilis at ligtas na paglipat ng transistor, na pumipigil sa shoot-through (sabay-sabay na pagpapadaloy na humahantong sa mga maikling circuit), at pamamahala ng init mula sa paglipat ng mataas na dalas.
Ang pagtatayo ng isang motor drive circuit ay nangangailangan ng masusing pagpaplano at tumpak na pagpapatupad.Alamin natin ang mga hakbang na kasangkot, na nakatuon sa isang circuit na gumagamit ng L293D motor driver at Arduino uno:
Component Paghahanda: Magsimula sa pamamagitan ng pangangalap ng mga mahahalagang - isang Arduino uno (o isang katugmang microcontroller), ang driver ng motor ng L293D, isa o higit pang mga motor ng DC, isang mapagkukunan ng kuryente (tulad ng isang baterya o power adapter), mga wire ng jumper, at anumang karagdagang mga sensor oMga Bahagi ng Auxiliary.
Ang pag-unawa sa L293D: Ang L293D, isang malawak na ginagamit na driver ng motor, ay maaaring hawakan hanggang sa 600mA at may kasamang labis na proteksyon.Nagtatampok ito ng maraming mga pin para sa kontrol ng motor (input at output), kapangyarihan, at saligan.
Disenyo ng Diagram ng Circuit: Ang mahalaga sa proseso ay lumilikha o kumunsulta sa isang diagram ng circuit.Ang blueprint na ito ay dapat ilarawan ang mga koneksyon sa pagitan ng mga digital output pin ng Arduino at ang mga input pin ng L293D, at ang pagsasama ng motor at power supply sa L293D.
Koneksyon ng Power: Ikabit ang mapagkukunan ng kuryente sa mga kapangyarihan ng L293D ng L293D.Tandaan, ang suplay ng kuryente ng Arduino Uno ay maaaring hindi sapat para sa direktang drive ng motor, na nangangailangan ng isang panlabas na supply ng kuryente.
Koneksyon ng Arduino-L293D: Gumamit ng mga wire ng jumper upang mai-link ang digital output pin ng Arduino sa mga pin ng input ng L293D.Ang pag -setup na ito ay nagbibigay -daan sa maaaring ma -program na kontrol sa direksyon at bilis ng motor.
Koneksyon ng motor: Ikabit ang mga humahantong sa motor sa mga output ng output ng L293D.Kung nagpapatakbo ka ng maraming motor, tiyakin ang tamang koneksyon sa bawat L293D channel.
Arduino Programming: Bumuo ng Arduino code para sa kontrol sa motor.Ito ay karaniwang nagsasangkot ng pag -uumpisa ng pin, pagtatakda ng halaga ng PWM para sa kontrol ng bilis, at pamamahala ng direksyon ng pag -ikot ng motor.
Pagsubok at pag -debug: Bago ang kapangyarihan ng circuit, maingat na i -verify ang lahat ng mga koneksyon.Post-upload ng code sa Arduino, subukan at obserbahan ang pag-uugali ng motor, paggawa ng mga pagsasaayos at pag-optimize kung kinakailangan.
Mga Panukala sa Kaligtasan: Tiyakin ang kaligtasan ng circuit sa pamamagitan ng paggamit ng isang angkop na rate ng mapagkukunan ng kuryente, pag-iwas sa mga panganib ng short-circuit, at pagsasama ng mga piyus o kasalukuyang mga limitasyon kung kinakailangan.
Sa madaling sabi, ang mga driver ng motor ay isang mahalagang bahagi ng mga modernong elektronikong sistema at naging pangkaraniwan dahil ang advanced na teknolohiya.Mula sa mga pangunahing circuit ng H-tulay hanggang sa mga advanced na integrated circuit driver, ang mga disenyo ng driver ng motor ay sumasakop sa isang malawak na hanay ng mga antas ng teknolohiya upang umangkop sa iba't ibang uri ng mga motor at mga kinakailangan sa aplikasyon.Inaasahan namin na ang artikulong ito ay naging kapaki -pakinabang sa iyo.Mangyaring huwag mag -atubiling makipag -ugnay sa amin sa anumang mga katanungan o serbisyo tungkol sa artikulong ito o alinman sa aming mga artikulo.
Ibahagi: