TB6600HG Stepper Driver: Mga pagtutukoy, tampok at aplikasyon
Catalog
Paglalarawan ng TB6600HG

TB6600HG ay isang uri ng PWM chopper na single-chip bipolar sinusoidal microstepping motor driver.Maaari itong makamit ang pasulong at baligtad na kontrol sa pag-ikot sa pamamagitan ng 2-phase, 1-2-phase, W1-2-phase, 2W1-2-phase, at 4W1-2-phase excitation mode.Ang 2-phase bipolar stepper motor ay hinihimok lamang sa pamamagitan ng isang mababang pag-vibration, signal ng high-efficiency clock.
Mga kahalili at katumbas:
At BD6290EFV-E2
At TB6600FG
At TB67S128FTG
At L6258EX
Mga pagtutukoy ng TB6600HG
• Katayuan ng Bahagi: Aktibo
• Packaging: tray
• Package / Kaso: Hzip-25
• Tagagawa: Toshiba
• Kasalukuyang Operating Supply: 4.2 Ma
• Boltahe ng Operating Supply: 2 V hanggang 5.5 V
• I -load ang Rating ng Boltahe: 8 V hanggang 42 V
• Bilang ng mga output: 2 output
• PD - Power Dissipation: 40 w
• Estilo ng Pag -mount: Sa pamamagitan ng Hole
• Haba ng Package/Lapad/Taas: 29.3mm (Max) /4.5mm/15.7mm
• Kategoryang Produkto: Mga Motor / Motion / Ignition Controller at Driver
Mga kondisyon ng pagpapatakbo ng TB6600HG
(Ta = -30 ° C hanggang 85 ° C)
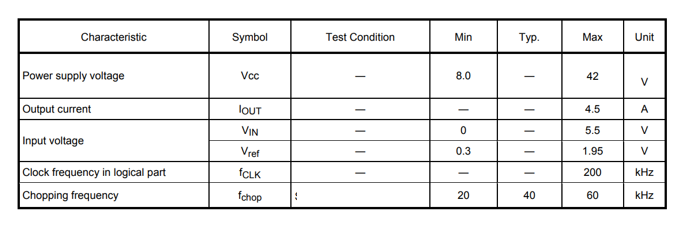
Tandaan: Ang dalawang mga terminal ng VCC ay dapat na na -program ng parehong boltahe.Ang maximum na kasalukuyang ng operating range ay hindi kinakailangang isagawa depende sa iba't ibang mga kondisyon dahil ang output kasalukuyang ay limitado sa pamamagitan ng power dissipation PD.Siguraduhin na maiwasan ang paggamit ng IC sa kondisyon na magiging sanhi ng temperatura na lumampas sa TJ (avg.) = 107 ° C.
Ang boltahe ng supply ng kuryente ng 42 V at ang output kasalukuyang ng 4.5 A ay ang maximum na mga halaga ng saklaw ng operating.Mangyaring idisenyo ang circuit na may sapat na derating sa loob ng saklaw na ito sa pamamagitan ng pagsasaalang -alang ng pagkakaiba -iba ng supply ng kuryente, ang panlabas na pagtutol, at ang mga de -koryenteng katangian ng IC.Sa kaso ng paglampas sa boltahe ng supply ng kuryente ng 42 V at ang output kasalukuyang ng 4.5 a, ang IC ay hindi gumana nang normal.
Paano ikonekta ang TB6600HG sa control system?
Koneksyon ng Power: Una, tiyaking magbigay ng naaangkop na supply ng kuryente sa TB6600HG.Kapag pinapagana ang TB6600HG, karaniwang kailangan mong ikonekta ang dalawang pin: VCC (positibong supply ng kuryente) at GND (ground wire).Ang VCC PIN ay may pananagutan sa pagbibigay ng boltahe na kinakailangan upang himukin ang chip, habang ang GND PIN ay nagsisilbing antas ng sanggunian.Kailangan nating tiyakin na ang suplay ng kuryente ay matatag at nakakatugon sa mga pagtutukoy ng TB6600HG.
Koneksyon ng Signal: Ayon sa mga tiyak na pangangailangan ng control system, kailangan nating ikonekta ang control signal sa kaukulang pin ng TB6600HG driver chip.Ang mga control signal na ito ay karaniwang kasama ang mga signal ng control control at mga signal ng pulso ng hakbang, atbp, na responsable sa pagtuturo kung paano kumikilos ang motor, kabilang ang direksyon ng pag -ikot at ang bilis ng pag -ikot.
Koneksyon sa motor: Kailangan nating maging maingat kapag kumokonekta sa motor sa TB6600HG driver chip.Ang dalawang wire ng motor, karaniwang pula at itim, ay kumakatawan sa positibo at negatibong mga poste ng motor ayon sa pagkakabanggit.Ang pulang wire ay karaniwang kumokonekta sa positibong terminal ng motor, habang ang itim na kawad ay kumokonekta sa negatibong terminal.
Koneksyon ng Feedback (Opsyonal): Kung ang isang encoder ay ginagamit para sa control ng feedback, kailangan din nating ikonekta ang output signal ng encoder sa control system.Karaniwang kasama nito ang mga output ng phase A, phase B, at phase Z (kung magagamit).
Grounding: Kailangan nating tiyakin na ang karaniwang ground wire ng lahat ng kagamitan ay konektado nang tama upang maiwasan ang pagkagambala at pinsala.
Mga Setting ng Initialization: Matapos kumpleto ang koneksyon, kailangan nating simulan ang mga setting ng TB6600HG upang matiyak na gumagana ito nang tama.Maaaring kabilang dito ang pagtatakda ng kasalukuyang mga limitasyon, mga mode ng stepping, atbp.
Mga tampok ng produkto ng TB6600HG
• Gumawa ng isang pinalawak na radiator para sa mahusay na pagwawaldas ng init
• Ang mga tagubilin sa pag -setup ng subdibisyon ay nakalimbag sa likod ng board
• Gamit ang function ng proteksyon ng maikling circuit, walang pag-alala
• Pagtibay ng 6N137 High-Speed Optical Coupling upang matiyak ang mataas na bilis nang walang pagkawala ng pag-synchronize
• Ang output kasalukuyang ay hindi maayos na nababagay upang matugunan ang iyong iba't ibang mga pangangailangan sa aplikasyon
• Gamit ang karaniwang mode ng pag -input ng anode, mayroong dalawang mga terminal ng pag -input, na ginagawang maginhawa ang mga kable
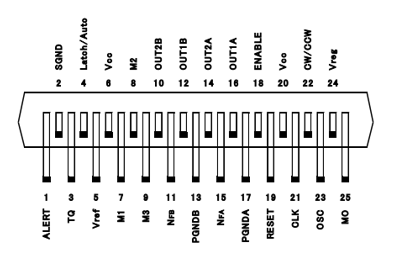
Pag -configure ng PIN ng TB6600HG
Paglalarawan ng Pag -andar ng TB6600HG
Mga setting ng paggulo
Ang mode ng paggulo ay maaaring mapili mula sa sumusunod na walong mga mode gamit ang mga input ng M1, M2 at M3.Kapag ang mga input ng M1, M2, o M3 ay inilipat sa panahon ng operasyon ng motor, ang isang bagong mode ng paggulo ay nagsisimula mula sa paunang mode, na potensyal na makagambala sa pagpapatuloy ng output kasalukuyang alon.
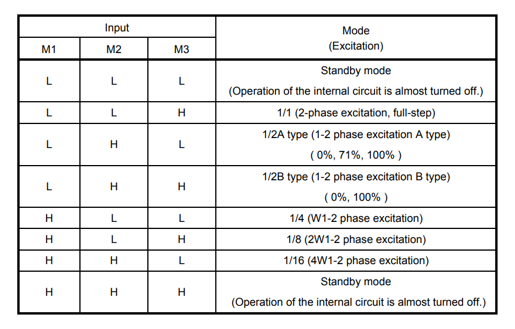
Tandaan: Upang baguhin ang kapana -panabik na mode sa pamamagitan ng pagbabago ng M1, M2, at M3, tiyaking hindi itakda ang M1 = M2 = M3 = L o M1 = M2 = M3 = H.
Mode ng standby
Ang mode ng operasyon ay gumagalaw sa mode ng standby sa ilalim ng kondisyon M1 = M2 = M3 = L o M1 = M2 = M3 = H. Ang pagkonsumo ng kuryente ay nabawasan sa pamamagitan ng pag -off ang lahat ng mga operasyon maliban sa pagprotekta sa operasyon.Sa standby mode, ang output terminal mo ay Hz.Ang standby mode ay pinakawalan sa pamamagitan ng pagbabago ng estado ng m1 = m2 = m3 = l at m1 = m2 = m3 = h sa ibang estado.Ang signal ng pag -input ay hindi tinatanggap para sa mga 200 μs pagkatapos ilabas ang mode ng standby.
Mode ng pagkabulok
Ang pagsingil at paglabas ng isang kasalukuyang sa mode na PWM ay karaniwang nangangailangan ng halos limang siklo sa OSCM.Ang 40 porsyento na mabilis na pagkabulok mode ay sinimulan sa pamamagitan ng pag -uudyok ng pagkabulok sa loob ng panghuling dalawang siklo ng mabilis na pagkabulok mode, na may ratio na 40 porsyento na natitira na patuloy na naayos.Ang ugnayan sa pagitan ng dalas ng master clock (FMCLK), ang OSCM frequency (FOSCM) at ang PWM frequency (FCHOP) ay ipinapakita tulad ng sumusunod:
foscm = 1/20 × fmclk
FCHOP = 1/100 × FMCLK
Kapag rosc = 51kΩ, ang master orasan = 4MHz, OSCM = 200kHz, ang dalas ng PWM (fchop) = 40kHz.
Paunang mode
Kapag ginamit ang pag -reset, ang mga phase currents ay ang mga sumusunod.
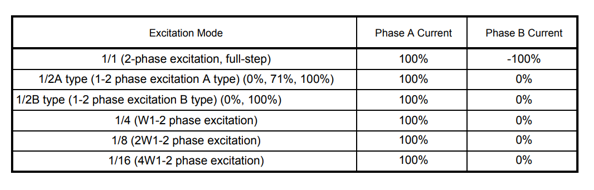
Ang kasalukuyang direksyon ay tinukoy bilang mga sumusunod.
Out1a → Out2a: Forward Direction
Out1b → Out2b: Direksyon ng Forward
Application ng TB6600HG
Ang nakalista sa ibaba ay ang ilang mga aplikasyon ng TB6600HG.
• Mga ilaw sa buntot
• Mga gusali ng mabuting pakikitungo
• Malaking panlabas na LED display
• Alternatibo sa mga ilaw ng HID
• Mga ilaw sa high-bay sa industriya
• Malaking format na LED backlighting
• Ipakita ang LED Backlighting
• Mga smartphone na pinagana ng camera
• Mga step-up o step-down na mga topologies ng driver
Karaniwang mga pagkakamali at solusyon ng TB6600HG
Ang mga sumusunod ay naglista ng ilang mga karaniwang pagkakamali tungkol sa TB6600HG at ang kanilang mga solusyon upang matulungan kang gumawa ng mabilis na pagkilos kapag nakatagpo ng mga pagkakamali at pangalagaan ang normal na operasyon ng aparato.
Pagkabigo ng isa: Pag -init ng driver ng chip
Ang TB6600HG chip mismo ay masyadong mainit, marahil dahil sa labis na pag -load o hindi magandang kondisyon ng pagwawaldas ng init.
Solusyon: Pagpapahusay ng dissipation ng init
Kailangan nating magdagdag ng mga heat sink o mga tagahanga sa driver chip at motor upang matiyak na maaari nilang ganap na mawala ang init habang nagtatrabaho.Kasabay nito, kailangan nating panatilihin ang kapaligiran sa paligid ng driver ng chip at motor na mahusay na maiwasan upang maiwasan ang sobrang pag -init.
Pagkabigo Dalawa: Ang motor ay umiikot sa maling direksyon
Matapos matanggap ng motor ang signal ng drive, ang direksyon ng pag -ikot ay hindi naaayon sa inaasahan, maaaring ito ang control signal ay mali o ang drive chip ay hindi maayos na na -configure.
Solusyon: Suriin ang signal ng control
Kailangan nating maingat na suriin ang mga signal ng control na ipinadala sa TB6600HG upang matiyak na tama ang signal ng direksyon at signal ng pulso.Kung ang isang microcontroller ay ginagamit upang maipadala ang mga signal, mangyaring suriin ang code ng programa at pagsasaayos ng PIN.
Pagkabigo Tatlong: Nabigo ang motor na paikutin
Ang motor ay hindi tumugon pagkatapos matanggap ang signal ng drive, maaaring ang driver chip ay hindi gumagana nang maayos o may problema sa koneksyon sa pagitan ng motor at ng driver chip.
Solusyon: Suriin ang power supply at koneksyon
Kailangan nating tiyakin na ang supply ng kuryente ng TB6600HG ay normal at ang koneksyon sa pagitan ng motor at ang driver chip ay solid.Sinusuri namin ang boltahe at kasalukuyang sa circuit sa pamamagitan ng paggamit ng isang multimeter upang matiyak na nasa normal na saklaw sila.
Pagkabigo apat: malubhang pagpainit ng motor
Ang motor ay bumubuo ng labis na init sa panahon ng operasyon, na maaaring sanhi ng labis na kasalukuyang o hindi magandang pag -iwas sa init.
Solusyon: Ayusin ang kasalukuyang setting
Kung ang motor ay bumubuo ng malubhang init, maaari nating subukang bawasan ang output kasalukuyang ng driver chip.Sa pamamagitan ng pag -aayos ng kasalukuyang setting ng pin ng TB6600HG, maaari nating epektibong limitahan ang laki ng kasalukuyang output, na kung saan ay binabawasan ang pasanin sa motor at tinitiyak ang matatag at ligtas na operasyon ng motor.
Madalas na Itinanong [FAQ]
1. Ano ang saklaw ng temperatura ng operating ng TB6600HG?
Ang operating temperatura ng TB6600HG saklaw mula -30 ° C hanggang 85 ° C.
2. Ano ang TB6600HG?
Ang TB6600HG ay isang uri ng driver ng motor ng stepper, na idinisenyo upang makontrol ang mga motor ng stepper sa iba't ibang mga aplikasyon tulad ng CNC machine, 3D printer, robotics, at mga sistema ng automation.
3. Ano ang mga pangunahing tampok ng TB6600HG?
Ang mga tampok ng TB6600HG ay may kasamang nababagay na kasalukuyang motor, mga setting ng resolusyon ng hakbang, built-in na overheating protection, at mga opto-isolated input para sa control control.
Tungkol sa atin
ALLELCO LIMITED
Magbasa nang higit pa
Mabilis na pagtatanong
Mangyaring magpadala ng isang pagtatanong, tutugon kami kaagad.

Detalyadong Pagtatasa at Gabay sa Application Para sa UCC27517DBVR Mataas na Pagganap ng Mababang Side Driver
sa 2024/09/3
STM32F030K6T6 Comprehensive Guide: Mataas na Pagganap ng ARM Cortex-M0 Microcontroller
sa 2024/09/3
Mga sikat na post
-
Ano ang GND sa circuit?
sa 1970/01/1 3272
-

RJ-45 Gabay sa Konektor: RJ-45 Mga Kulay ng Kulay ng Konektor, Mga Scheme ng Wiring, R-J45 Application, RJ-45 Datasheets
sa 1970/01/1 2815
-
Pag -unawa sa mga boltahe ng supply ng kuryente sa electronics VCC, VDD, VEE, VSS, at GND
sa 0400/11/20 2640
-

Mga Uri ng Connector ng Fiber: SC vs LC at LC vs MTP
sa 1970/01/1 2265
-

Paghahambing sa pagitan ng DB9 at RS232
sa 1970/01/1 1882
-

Ano ang baterya ng LR44?
Ang kuryente, na nasa buong lakas na iyon, tahimik na sumisid sa bawat aspeto ng ating pang-araw-araw na buhay, mula sa mga walang kabuluhan na mga gadget hanggang sa nagbabantang kagamitan sa medikal, gumaganap ito ng isang tahimik na papel.Gayunpaman, ang tunay na pagkakahawak ng enerhiya na ito, lalo na kung paano mag -imbak at mahusay na ma -output ito, ay hindi madaling gawain.Ito ay labag sa...sa 1970/01/1 1846
-
Pag -unawa sa mga batayan: paglaban sa inductance, atcapacitance
Sa masalimuot na sayaw ng elektrikal na engineering, isang trio ng mga pangunahing elemento ay tumatagal ng entablado: inductance, paglaban, at kapasidad.Ang bawat isa ay nagdadala ng mga natatanging katangian na nagdidikta sa mga dynamic na ritmo ng mga electronic circuit.Dito, nagsisimula kami sa isang paglalakbay upang matukoy ang mga kumplikado ng mga sangkap na ito, upang alisan ng takip ang ...sa 1970/01/1 1807
-
Ano ang RF at bakit natin ito ginagamit?
Ang teknolohiya ng Radio Frequency (RF) ay isang pangunahing bahagi ng modernong wireless na komunikasyon, na nagpapagana ng paghahatid ng data sa mga malalayong distansya nang walang pisikal na koneksyon.Ang artikulong ito ay sumasalamin sa mga pangunahing kaalaman ng RF, na nagpapaliwanag kung paano ginagawang posible ang electromagnetic radiation (EMR).Susuriin namin ang mga prinsipyo ng EMR, a...sa 1970/01/1 1801
-

CR2430 Baterya Comprehensive Guide: Mga pagtutukoy, aplikasyon at paghahambing sa mga baterya ng CR2032
Ano ang baterya ng CR2430?Mga benepisyo ng mga baterya ng CR2430PamantayanCR2430 Mga Application ng BateryaKatumbas ng CR2430CR2430 kumpara sa CR2032Laki ng baterya CR2430Ano ang hahanapin kapag bumili ng CR2430 at katumbasData Sheet PDFMadalas na nagtanong Ang mga baterya ay ang puso ng maliit na elektronikong aparato.Kabilang sa maraming mga uri na magagamit, ang mga cell ng barya ay naglalaro n...sa 1970/01/1 1799
-
Komprehensibong gabay sa HFE sa mga transistor
Ang mga transistor ay mga mahahalagang sangkap sa mga modernong elektronikong aparato, pagpapagana ng pagpapalakas at kontrol ng signal.Ang artikulong ito ay sumasalamin sa kaalaman na nakapalibot sa HFE, kasama na kung paano pumili ng halaga ng HFE ng transistor, kung paano makahanap ng HFE, at ang pakinabang ng iba't ibang uri ng mga transistor.Sa pamamagitan ng aming paggalugad ng HFE, nakakaku...sa 5600/11/20 1782
Mainit na bahagi ng numero
-

CC1206KRX7RABB153
YAGEO
CAP CER 0.015UF 200V X7R 1206
0603ZC222JAT2A
KYOCERA AVX
CAP CER 2200PF 10V X7R 0603
LTC1267CG
Analog Devices Inc.
IC REG CTRLR BUCK 28SSOP
SMBJ20A-TP
Micro Commercial Co
TVS DIODE 20VWM 32.4VC DO214AA
TPS7A2533DRVR
Texas Instruments
IC REG LINEAR 3.3V 300MA 6WSON
MSP430G2432IPW20R
Texas Instruments
IC MCU 16BIT 8KB FLASH 20TSSOP
MC74LCX573DTR2
onsemi
IC LATCH OCT 3ST LV CMOS 20TSSOP
1N2056
Solid State Inc.
DIODE GEN PURP 150V 275A DO9
1050480001
Molex
1.45MM LOW PROFILE SIM CARD CONN
KC2-19+
Mini-Circuits
2X SMT MULTIPLIER, OUTPUT FREQ 2
VS-10MQ060-M3/5AT
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 60V 1A DO214AC
PI6C10804WEX
Diodes Incorporated
IC CLK BUFFER 1:4 180MHZ 8SOIC
LA4815VH-TLM-H
onsemi
IC AMP AB MONO 1.84W 14HSSOP
STPS30L120CFP
STMicroelectronics
DIODE ARRAY SCHOTTKY 120V TO220F
SUCS102412B
Cosel USA, Inc.
DC DC CONVERTER 12V 12W
DMA964010R
Panasonic Electronic Components
TRANS PREBIAS DUAL PNP SSMINI6
NL453232T-681J-PF
TDK Corporation
FIXED IND 680UH 50MA 30 OHM SMD
T5754-6APJ
Microchip Technology
RF TX IC ASK 429-439MHZ 8TSSOP -

THS1206MDAREP
Texas Instruments
IC ADC 12BIT PIPELINED 32TSSOP
R6024KNZ1C9
Rohm Semiconductor
MOSFET N-CHANNEL 600V 24A TO247
DS90CF388VJD
Texas Instruments
LINE RECEIVER, 8 FUNC, 8 RCVR, P
2R5TPE220M7
Panasonic Electronic Components
CONDUCTIVE POLYMER TANTALUM SOLI
P6KE100A
Taiwan Semiconductor Corporation
TVS DIODE 85.5VWM 137VC DO15
LD1086V33
STMicroelectronics
IC REG LINEAR 3.3V 1.5A TO220AB
ADL5373ACPZ-R7
Analog Devices Inc.
RF MODULATOR 2.3GHZ-3GHZ 24VFQFN
MSP430F2616TPMR
Texas Instruments
IC MCU 16BIT 92KB FLASH 64LQFP
TLV320ADC3140IRTWT
Texas Instruments
IC ADC AUDIO 768K 24WQFN
IS61C64AL-10JLI
ISSI, Integrated Silicon Solution Inc
IC SRAM 64KBIT PARALLEL 28SOJ
CNC1S101S
Panasonic Electronic Components
OPTOISOLTR 5KV TRANSISTOR 4-DIL
BD13910S
Fairchild Semiconductor
POWER BIPOLAR TRANSISTOR, 1.5A,
DM74LS258BN
onsemi
IC MULTIPLEXER 4 X 2:1 16DIP
SN74ABT16623DL
Texas Instruments
IC TXRX NON-INVERT 5.5V 48SSOP
V150B24H250BL2
Vicor Corporation
DC DC CONVERTER 24V 250W
MX7537JN
Analog Devices Inc./Maxim Integrated
IC DAC 12BIT A-OUT 24DIP
7443340220
Würth Elektronik
FIXED IND 2.2UH 16.5A 5.6MOHM SM
XC2V1000-4FFG896C
AMD
IC FPGA 432 I/O 896FCBGA -

PSMN009-100P,127
NXP Semiconductors
NEXPERIA PSMN009-100P - 75A, 100
SN74HC10DR
Texas Instruments
IC GATE NAND 3CH 3-INP 14SOIC
IS25LP256D-RMLE-TR
ISSI, Integrated Silicon Solution Inc
IC FLASH 256MBIT SERIAL 16SOIC
C3216CH2A822J115AA
TDK Corporation
CAP CER 8200PF 100V CH 1206
GCM1885C2A5R6DA16J
Murata Electronics
CAP CER 5.6PF 100V C0G/NP0 0603
PAL16R6D/2JC
Vantis
OT PLD, 10NS, PAL-TYPE, TTL, PQC
STK673-010-E
onsemi
IC MTR DRV MULTIPHASE 4.75-5.25V
06031A240JAT2A
KYOCERA AVX
CAP CER 24PF 100V C0G/NP0 0603
SRR0604-101KL
Bourns Inc.
FIXED IND 100UH 400MA 650MOHM SM
D6HH1G960BH95-Z
Taiyo Yuden
RF DUPLEXER 9SMD NO LEAD
L7980ATR
STMicroelectronics
IC REG BUCK ADJUSTABLE 2A 8HSOP
ADL5201ACPZ-R7
Analog Devices Inc.
IC RF AMP 700MHZ 24LFCSP
SURS8340T3G
onsemi
DIODE GEN PURP 400V 3A SMC
CY7C1314KV18-250BZC
Infineon Technologies
IC SRAM 18MBIT PAR 165FBGA
HMC362S8G
Analog Devices Inc.
IC DIVIDER DC-12GHZ BY-4 8SMD
VE-JWT-EX
Vicor Corporation
DC DC CONVERTER 6.5V 75W
SBYV27-200-E3/73
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 200V 2A DO204AC
MC33174DR2G
onsemi
IC OPAMP GP 4 CIRCUIT 14SOIC