MPU-6050 sa Aksyon: Praktikal na Gabay sa Pag-setup, Pag-configure, at Pamamahala sa Ingay
Catalog
Panimula sa MPU-6050
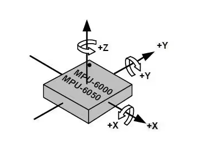
MPU-6050 ay ang unang pinagsama-samang 6-axis motion processing na bahagi, na nagsasama ng isang 3-axis gyroscope, 3-axis accelerometer, at isang scalable digital motion processor (DMP).Ang layunin ng paggamit nito ay upang makuha ang anggulo ng pagkahilig ng bagay na susukat (tulad ng isang quadcopter, isang pagbabalanse ng kotse) sa x, y, at z axes, iyon ay, ang anggulo ng pitch, anggulo ng roll, at anggulo ng yaw.Nabasa namin ang anim na data ng MPU-6050 (three-axis acceleration na halaga ng ad at three-axis angular velocity ad na halaga) sa pamamagitan ng interface ng I2C.Matapos ang pagproseso ng pustura ng pagsasanib, ang mga anggulo ng pitch, roll, at yaw ay maaaring kalkulahin.Bilang isang direksyon na sanggunian para sa mga halaga ng pagsukat, ang kahulugan ng direksyon ng coordinate ng sensor ay tulad ng ipinapakita sa figure sa ibaba, na sumusunod sa prinsipyo ng kanang sistema ng coordinate (iyon ay, ang tamang mga puntos ng hinlalaki sa positibong direksyon ng x-Axis, ang index daliri ay tumuturo sa positibong direksyon ng y-axis, at ang gitnang daliri ay tumuturo sa positibong direksyon ng z-axis).
Gamit ang nakalaang I2C sensor bus, ang MPU-6050 ay nakatanggap ng input nang direkta mula sa isang panlabas na 3-axis compass, na nagbibigay ng isang buong 9-axis MotionFusion ™ output.Tinatanggal nito ang problema sa pagkakaiba-iba sa pagitan ng pinagsamang gyroscope at timeline ng accelerator at makabuluhang binabawasan ang puwang ng packaging kumpara sa mga multi-sangkap na solusyon.Kapag konektado sa isang three-axis magnetometer, ang MPU-60X0 ay may kakayahang magbigay ng buong 9-axis na paggalaw ng fusion output sa pangunahing I2C o SPI port (tandaan na ang SPI port ay magagamit lamang sa MPU-6000).
Mga kahalili at katumbas
At AIS328DQTR
At ICM-20689
• MPU-3300
At MPU-6000
At MPU-6500
Tagagawa ng MPU-6050
Ang tagagawa ng MPU-6050 ay TDK.Matapos ang dalawang tagapagtatag ng TDK, sina Dr. Yogoro Kato at Takei Takei, ay nag -imbento ng ferrite sa Tokyo, itinatag nila ang Tokyo Denkikagaku Kogyo K.K.Noong 1935. Bilang isang pandaigdigang tatak ng industriya ng electronics, ang TDK ay palaging pinapanatili ang isang nangingibabaw na posisyon sa larangan ng elektronikong hilaw na materyales at mga elektronikong sangkap.TDK's comprehensive and innovation-driven product portfolio covers passive components such as ceramic capacitors, aluminum electrolytic capacitors, film capacitors, magnetic products, high-frequency components, piezoelectric and protection devices, as well as sensors and sensor systems (such as temperature and pressure,Magnetic at MEMS sensor), atbp Bilang karagdagan, ang TDK ay nagbibigay din ng mga power supply at mga aparato ng enerhiya, magnetic head at iba pang mga produkto.Kasama sa mga tatak ng produkto nito ang TDK, EPCOs, Invensense, Micronas, Tronics, at TDK-Lambda.
Panloob na diagram ng block ng MPU-6050
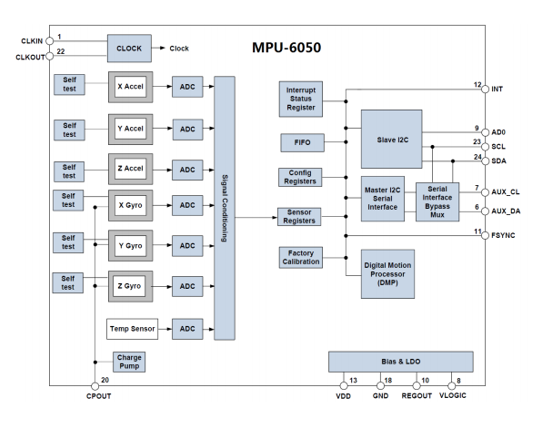
Kabilang sa mga ito, ang SCL at SDA ay ang mga interface ng IIC na konektado sa MCU, at kinokontrol ng MCU ang MPU-6050 sa pamamagitan ng IIC interface na ito.Mayroon ding isang interface ng IIC, lalo na ang AUX_CL at AUX_DA.Ang interface na ito ay maaaring magamit upang ikonekta ang mga panlabas na aparato ng alipin, tulad ng mga magnetic sensor, upang makabuo ng isang siyam na axis sensor.Ang Vlogic ay ang boltahe ng port ng IO.Ang pin na ito ay maaaring suportahan ang isang minimum na 1.8V.Karaniwan naming ikinonekta ito nang direkta sa VDD.Ang AD0 ay ang address control pin ng interface ng Slave IIC (konektado sa MCU).Kinokontrol ng pin na ito ang pinakamababang bit ng IIC address.Kung konektado ito sa GND, ang IIC address ng MPU-6050 ay 0x68;Kung ito ay konektado sa VDD, ito ay 0x69.Mangyaring tandaan na ang address dito ay hindi kasama ang pinakamababang bit ng paghahatid ng data (ang pinakamababang bit ay ginagamit upang kumatawan sa mga operasyon na basahin at isulat).Sa MWBalancedStc15, ang AD0 ay konektado sa GND, kaya ang IIC address ng MPU-6050 ay 0x68 (hindi kasama ang pinakamababang bit).
Sinisimulan ang interface ng IIC
Ang MPU-6050 ay gumagamit ng IIC upang makipag-usap sa STC15, kaya kailangan nating simulan ang mga linya ng data ng SDA at SCL na konektado sa MPU-6050 muna.
I-reset ang MPU-6050
Ang hakbang na ito ay nagpapanumbalik ng lahat ng mga rehistro sa loob ng MPU-6050 sa kanilang mga default na halaga, na nakamit sa pamamagitan ng pagsulat ng 1 hanggang bit 7 ng Power Management Register 1 (0x6b).Matapos i-reset, ang Power Management Register 1 ay maibabalik sa default na halaga (0x40), at ang rehistro na ito ay dapat na pagkatapos ay itakda sa 0x00 upang gisingin ang MPU-6050 at ilagay ito sa isang normal na estado ng pagtatrabaho.
Itakda ang buong saklaw ng Angular Velocity Sensor (Gyro) at Acceleration Sensor
Sa hakbang na ito, itinakda namin ang full-scale range (FSR) ng dalawang sensor sa pamamagitan ng rehistro ng Gyroscope Configuration (0x1B) at ang Acceleration Sensor Configuration Register (0x1C) ayon sa pagkakabanggit.Karaniwan, itinakda namin ang buong saklaw ng gyroscope sa ± 2000dps at ang buong saklaw ng accelerometer sa ± 2G.
Magtakda ng iba pang mga parameter
Dito, kailangan din nating i-configure ang mga sumusunod na mga parameter: Patayin ang mga pagkagambala, huwag paganahin ang interface ng Aux I2C, huwag paganahin ang FIFO, itakda ang rate ng pag-sampling ng gyroscope, at i-configure ang digital na low-pass filter (DLPF).Dahil hindi namin ginagamit ang mga pagkagambala upang mabasa ang data sa kabanatang ito, kailangang i -off ang pag -andar ng pag -andar.Kasabay nito, dahil hindi namin ginagamit ang interface ng Aux I2C upang ikonekta ang iba pang mga panlabas na sensor, kailangan din nating isara ang interface na ito.Ang mga pag -andar na ito ay maaaring kontrolado sa pamamagitan ng makagambala Paganahin ang rehistro (0x38) at rehistro ng control ng gumagamit (0x6A).Ang MPU-6050 ay maaaring gumamit ng FIFO upang mag-imbak ng data ng sensor, ngunit hindi namin ito ginamit sa kabanatang ito, kaya ang lahat ng mga channel ng FIFO ay kailangang sarado.Maaari itong kontrolado sa pamamagitan ng FIFO Paganahin ang rehistro (0x23).Bilang default, ang halaga ng rehistro na ito ay 0 (iyon ay, hindi pinagana ang FIFO), kaya maaari naming gamitin nang direkta ang default na halaga.Ang sampling rate ng gyroscope ay kinokontrol ng sampling rate divider rehistro (0x19).Karaniwan, itinakda namin ang rate ng sampling na ito sa 50. Ang pagsasaayos ng digital na low-pass filter (DLPF) ay nakumpleto sa pamamagitan ng rehistro ng pagsasaayos (0x1a).Sa pangkalahatan, magtatakda kami ng DLPF sa kalahati ng bandwidth upang balansehin ang kawastuhan ng data at bilis ng pagtugon.
I -configure ang mapagkukunan ng orasan ng system at paganahin ang angular velocity sensor at sensor ng acceleration
Ang setting ng mapagkukunan ng orasan ng system ay nakasalalay sa rehistro ng pamamahala ng kuryente 1 (0x6b), kung saan ang pinakamababang tatlong piraso ng rehistro na ito ay matukoy ang pagpili ng mapagkukunan ng orasan.Bilang default, ang tatlong bits na ito ay nakatakda sa 0, na nangangahulugang ang system ay gumagamit ng panloob na 8MHz RC oscillator bilang pinagmulan ng orasan.Gayunpaman, upang mapagbuti ang kawastuhan ng orasan, madalas naming itinakda ito sa 1 at piliin ang X-axis gyroscope PLL bilang pinagmulan ng orasan.Bilang karagdagan, ang pagpapagana ng angular velocity sensor at acceleration sensor ay isang mahalagang hakbang din sa proseso ng pagsisimula.Ang parehong mga operasyon ay ipinatupad sa pamamagitan ng Power Management Register 2 (0x6C).Itakda lamang ang kaukulang bit sa 0 upang maisaaktibo ang kaukulang sensor.Matapos makumpleto ang mga hakbang sa itaas, ang MPU-6050 ay maaaring magpasok ng normal na katayuan sa pagtatrabaho.Ang mga rehistro na hindi espesyal na itinakda ay tatanggapin ang mga default na halaga na preset ng system.
Paano gumagana ang MPU-6050?
Gyro Sensor
Ang sensor ay nilagyan ng isang gyro sa loob, na palaging mananatiling kahanay sa paunang direksyon dahil sa epekto ng gyroscopic.Samakatuwid, maaari nating kalkulahin ang direksyon at anggulo ng pag -ikot sa pamamagitan ng pag -alis ng paglihis ng gyro mula sa paunang direksyon.
Accelerometer sensor
Ang isang sensor ng accelerometer ay isang aparato na maaaring masukat ang pagpabilis at gumagana ito batay sa prinsipyo ng piezoelectric na epekto.Sa panahon ng pagpabilis, sinusukat ng sensor ang inertial force na inilalapat sa mass block at pagkatapos ay kinakalkula ang halaga ng pagpabilis gamit ang pangalawang batas ng Newton.
Digital Motion Processor (DMP)
Ang DMP ay isang module ng pagproseso ng data sa MPU6050 chip na may built-in na Kalman na pag-filter ng algorithm para sa pagkuha ng data mula sa mga sensor ng gyroscope at accelerometer at pagproseso ng mga output quaternions.Ang tampok na ito ay lubos na binabawasan ang workload ng peripheral microprocessor at iniiwasan ang nakakapagod na pag -filter at proseso ng pagsasanib ng data.
Mga Tala:
Quaternions: Ang mga Quaternions ay simpleng mga numero ng supercomplex.Ang mga kumplikadong numero ay binubuo ng mga tunay na numero kasama ang haka -haka na yunit I, kung saan i^2 = -1.
Saan ginamit ang MPU-6050?
• Mga Laruan
• Handset at portable gaming
• Mga Controller ng laro na batay sa paggalaw
• Teknolohiya ng Blurfree ™ (para sa pag -stabilize ng video/imahe pa rin)
• Teknolohiya ng AirSign ™ (para sa seguridad/pagpapatunay)
• Pagkilala sa Gest ng Instanture ™ IG ™
• Mga sensor na naisusuot para sa kalusugan, fitness at palakasan
• Paggawa ng laro at balangkas ng aplikasyon
• Teknolohiya ng MotionCommand ™ (para sa mga gesture short-cut)
• Mga Serbisyo na Batay sa Lokasyon, Mga Punto ng Interes, at Patay na Pagbibilang
• 3D remote control para sa mga DTV na konektado sa Internet at mga set-top box, 3D mice
• TouchanyWhere ™ Technology (para sa "Walang Touch" UI Application Control/Navigation)
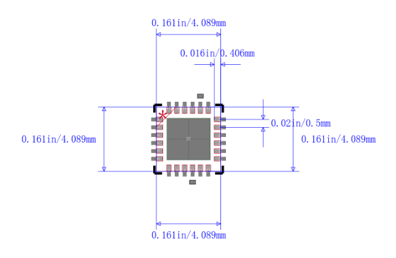
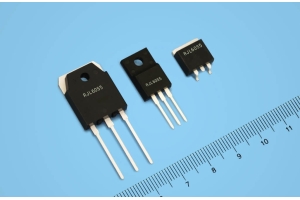
Package ng MPU-6050
Paano mabawasan ang ingay ng MPU-6050?
Maaari naming gawin ang mga sumusunod na paraan upang mabawasan ang ingay ng MPU-6050:
Gumamit ng mga calibrated sensor: Ang pag-calibrate ng accelerometer at gyroscope ng MPU-6050 ay maaaring matanggal ang bias at pagkakamali ng mga sensor mismo, kaya binabawasan ang epekto ng ingay.Ang proseso ng pagkakalibrate ay karaniwang binubuo ng dalawang yugto: static na pagkakalibrate at paggalaw ng paggalaw.
Proseso ng Pag-filter ng Hardware: Ang pagdaragdag ng mga capacitor ng filter sa linya ng kuryente ng MPU-6050 ay maaaring mabawasan ang epekto ng ingay ng suplay ng kuryente sa sensor.Samantala, sa layout ng PCB, dapat nating subukang panatilihin ang MPU-6050 mula sa mga potensyal na mapagkukunan ng pagkagambala, tulad ng mga linya ng signal ng high-frequency at mga sangkap na may mataas na kapangyarihan.
Pagproseso ng pag-filter ng software: Matapos ang pagkolekta ng hilaw na data mula sa MPU-6050, maaari kaming magdagdag ng isang link sa pag-filter ng software upang ma-pre-process ang paunang data upang maalis ang panghihimasok sa ingay.Karaniwang ginagamit na mga pamamaraan ng pag -filter ng software ay kasama ang ibig sabihin ng pag -filter, median filter, pag -filter ng Kalman at iba pa.
Gumamit ng panloob na low-pass filter: Ang MPU-6050 ay may panloob na integrated digital low-pass filter, na maaaring magamit upang mabawasan ang mataas na dalas na ingay sa pamamagitan ng pagtatakda ng dalas ng cutoff nito.Partikular, maaari naming itakda ang dalas ng cutoff ng digital filter sa pamamagitan ng pagbabago ng config rehistro ng MPU-6050 upang maalis ang mataas na dalas na ingay na dulot ng A/D sampling.
Ang pagkalkula ng MPU-6050 na batay sa paggalaw ng paggalaw ng paggalaw
Ang MPU-6050 ay isang anim na-accelerometer at sensor ng gyroscope na maaaring magamit upang masukat ang paggalaw at saloobin ng mga bagay.Ang pagkalkula ng paggalaw ng paggalaw batay sa MPU-6050 ay maaaring matanto sa pamamagitan ng mga sumusunod na hakbang:
Ang unang hakbang ay basahin ang data ng sensor.Kailangan nating basahin ang data ng accelerometer at gyroscope mula sa mga sensor ng MPU-6050 gamit ang naaangkop na mga driver at pag-andar ng aklatan.Ang mga data na ito ay karaniwang output sa isang digital na format, kaya ang ilang mga conversion at pagkakalibrate ay kinakailangan upang mai -convert ang mga ito sa aktwal na mga sukat sa mga pisikal na yunit.
Ang pangalawang hakbang ay upang makalkula ang pagpabilis.Una, kailangan nating iproseso ang data mula sa accelerometer upang makuha ang pagpabilis ng bagay sa bawat axis.Kasunod nito, upang makalkula ang bilis at pag -aalis ng bagay sa bawat axis, kailangan nating isama ang data ng pagpabilis.Ang mga diskarte sa pagsasama ng numero, tulad ng pamamaraan ni Euler o ang pamamaraan ng Lunger-Kutta, ay madalas na ginagamit sa prosesong ito upang matiyak ang kawastuhan ng mga kalkulasyon ng pag-aalis.
Ang ikatlong hakbang ay upang makalkula ang angular na tulin.Gamit ang data ng gyroscope, ang angular na tulin ng bagay sa bawat axis ay maaaring kalkulahin.Muli, ang data na ito ay kailangang ma -calibrate at ma -convert upang makuha ang angular na tulin sa aktwal na mga pisikal na yunit.
Ang ika -apat na hakbang ay upang makalkula ang pag -ikot.Sa pamamagitan ng pagsasama ng angular na bilis ng data, ang anggulo ng pag -ikot ng bagay sa bawat axis ay maaaring kalkulahin.Magagawa ito gamit ang mga diskarte sa pagsasama ng numero tulad ng pamamaraan ni Euler o ang paraan ng Longe-Kutta upang makalkula ang anggulo.
Ang ikalimang hakbang ay upang pagsamahin ang data.Pinagsasama namin ang data mula sa mga accelerometer at gyroscope upang makakuha ng kumpletong saloobin at posisyon ng posisyon ng bagay.Magagawa ito gamit ang mga algorithm tulad ng Quaternion-based na Saloobin Solver o Euler Angle Solver.
Ang ikaanim na hakbang ay upang mailarawan ang mga resulta.Na -convert namin ang nakalkula na trajectory ng paggalaw ng object sa isang hanay ng mga puntos sa isang sistema ng coordinate ng 3D at ipakita ito gamit ang naaangkop na mga tool sa paggunita para sa isang mas madaling maunawaan na pag -unawa sa paggalaw ng paggalaw ng bagay at mga pagbabago sa saloobin.
Madalas na Itinanong [FAQ]
1. Gaano katumpak ang MPU6050?
Ang nakuha na mga resulta ay nagpakita ng sapat na kawastuhan ng mas mababa sa 1 % at pagiging maaasahan, na tinitiyak ang wastong sukat ng shaft ng elevator at ang mataas na pamantayan ng industriya ng pag -angat.
2. Paano basahin ang data mula sa MPU6050?
Upang mabasa ang mga panloob na rehistro ng MPU6050, ang Master ay nagpapadala ng isang kondisyon ng pagsisimula, na sinusundan ng I2C Slave Address at isang Writing Bit, at pagkatapos ay ang Rehistro ng Rehistro na babasahin.
3. Saan ginamit ang MPU6050?
Sa masusuot na pagsubaybay sa kalusugan, mga aparato sa pagsubaybay sa fitness.Sa mga drone at quadcopter, ang MPU6050 ay ginagamit para sa control control.Ginamit sa pagkontrol ng robotic braso.Mga aparato ng kontrol sa kilos ng kamay.
4. Ang MPU6050 ba ay isang IMU?
Ang MPU6050 IMU sensor block ay nagbabasa ng data mula sa MPU-6050 sensor na konektado sa hardware.Ang pagbilis ng block output, angular rate, at temperatura kasama ang mga axes ng sensor.
5. Ano ang pagproseso ng MPU6050?
Ito ang processor ng onboard ng MPU6050 na pinagsasama ang data na nagmula sa accelerometer at gyroscope.Ang DMP ay ang susi sa paggamit ng MPU6050 at ipinaliwanag nang detalyado sa ibang pagkakataon.Tulad ng lahat ng mga microprocessors ang DMP ay nangangailangan ng firmware upang tumakbo.
Tungkol sa atin
ALLELCO LIMITED
Magbasa nang higit pa
Mabilis na pagtatanong
Mangyaring magpadala ng isang pagtatanong, tutugon kami kaagad.

Malalim na Gabay sa LM317: Pag-unawa sa Mga nababagay na regulator ng boltahe
sa 2024/09/3
Pag -unawa sa TL431: Isang komprehensibong gabay sa mga regulator ng precision shunt
sa 2024/09/3
Mga sikat na post
-
Ano ang GND sa circuit?
sa 1970/01/1 3103
-

RJ-45 Gabay sa Konektor: RJ-45 Mga Kulay ng Kulay ng Konektor, Mga Scheme ng Wiring, R-J45 Application, RJ-45 Datasheets
sa 1970/01/1 2670
-
Pag -unawa sa mga boltahe ng supply ng kuryente sa electronics VCC, VDD, VEE, VSS, at GND
sa 0400/11/15 2209
-

Mga Uri ng Connector ng Fiber: SC vs LC at LC vs MTP
sa 1970/01/1 2182
-

Paghahambing sa pagitan ng DB9 at RS232
sa 1970/01/1 1802
-

Ano ang baterya ng LR44?
Ang kuryente, na nasa buong lakas na iyon, tahimik na sumisid sa bawat aspeto ng ating pang-araw-araw na buhay, mula sa mga walang kabuluhan na mga gadget hanggang sa nagbabantang kagamitan sa medikal, gumaganap ito ng isang tahimik na papel.Gayunpaman, ang tunay na pagkakahawak ng enerhiya na ito, lalo na kung paano mag -imbak at mahusay na ma -output ito, ay hindi madaling gawain.Ito ay labag sa...sa 1970/01/1 1774
-
Pag -unawa sa mga batayan: paglaban sa inductance, atcapacitance
Sa masalimuot na sayaw ng elektrikal na engineering, isang trio ng mga pangunahing elemento ay tumatagal ng entablado: inductance, paglaban, at kapasidad.Ang bawat isa ay nagdadala ng mga natatanging katangian na nagdidikta sa mga dynamic na ritmo ng mga electronic circuit.Dito, nagsisimula kami sa isang paglalakbay upang matukoy ang mga kumplikado ng mga sangkap na ito, upang alisan ng takip ang ...sa 1970/01/1 1728
-

CR2430 Baterya Comprehensive Guide: Mga pagtutukoy, aplikasyon at paghahambing sa mga baterya ng CR2032
Ano ang baterya ng CR2430?Mga benepisyo ng mga baterya ng CR2430PamantayanCR2430 Mga Application ng BateryaKatumbas ng CR2430CR2430 kumpara sa CR2032Laki ng baterya CR2430Ano ang hahanapin kapag bumili ng CR2430 at katumbasData Sheet PDFMadalas na nagtanong Ang mga baterya ay ang puso ng maliit na elektronikong aparato.Kabilang sa maraming mga uri na magagamit, ang mga cell ng barya ay naglalaro n...sa 1970/01/1 1673
-
Ano ang RF at bakit natin ito ginagamit?
Ang teknolohiya ng Radio Frequency (RF) ay isang pangunahing bahagi ng modernong wireless na komunikasyon, na nagpapagana ng paghahatid ng data sa mga malalayong distansya nang walang pisikal na koneksyon.Ang artikulong ito ay sumasalamin sa mga pangunahing kaalaman ng RF, na nagpapaliwanag kung paano ginagawang posible ang electromagnetic radiation (EMR).Susuriin namin ang mga prinsipyo ng EMR, a...sa 1970/01/1 1669
-
Komprehensibong gabay sa HFE sa mga transistor
Ang mga transistor ay mga mahahalagang sangkap sa mga modernong elektronikong aparato, pagpapagana ng pagpapalakas at kontrol ng signal.Ang artikulong ito ay sumasalamin sa kaalaman na nakapalibot sa HFE, kasama na kung paano pumili ng halaga ng HFE ng transistor, kung paano makahanap ng HFE, at ang pakinabang ng iba't ibang uri ng mga transistor.Sa pamamagitan ng aming paggalugad ng HFE, nakakaku...sa 5600/11/15 1629
Mainit na bahagi ng numero
-

CD3251B2RSER
Texas Instruments
PROTOTYPE
PS9308L2-V-E3-AX
Renesas Electronics America Inc
OPTOISO 5KV 1CH GATE DRVR 6SDIP
MT48H8M16LFB4-10
Micron Technology Inc.
IC DRAM 128MBIT PAR 54VFBGA
IRG4BC20FPBF
Infineon Technologies
IGBT 600V 16A 60W TO220AB
0805ZD155KAT2A
AVX Corporation
CAP CER 1.5UF 10V X5R 0805
RT0805BRD0734KL
YAGEO
RES SMD 34K OHM 0.1% 1/8W 0805
MC34067DW
onsemi
IC REG CTRLR FLYBACK 16SOIC
MAX978ESE+T
Analog Devices Inc./Maxim Integrated
IC COMPARATOR 4 GEN PUR 16SOIC
74F38SJ
onsemi
IC GATE NAND OPEN 4CH 2-IN 14SOP
C5750X7R2A155M230KA
TDK Corporation
CAP CER 1.5UF 100V X7R 2220
SMCJ64CA
Littelfuse Inc.
TVS DIODE 64VWM 103VC DO214AB
2N3098
Solid State Inc.
SCR , 70 AMP 1.3KV TO-94
S-24CS02ADP-G
ABLIC Inc.
IC EEPROM 2KBIT I2C 400KHZ 8DIP
MC74HC1G14DFT1
onsemi
IC INVERTER SGL SCHMITT SOT-353
MMBZ5237B_R1_00001
Panjit International Inc.
SURFACE MOUNT SILICON ZENER DIOD
CRCW04021K18FKED
Vishay Dale
RES SMD 1.18K OHM 1% 1/16W 0402
TPS65921B1ZQZR
Texas Instruments
IC PWR MGMT 4 LDO TXRX 120BGA
TLC0820ACDW
Texas Instruments
IC ADC 8BIT FLASH 20SOIC -

ECS-250-16-30B
ECS Inc.
CRYSTAL 25.0000MHZ 16PF SMD
24LC128-I/MF
Microchip Technology
IC EEPROM 128KBIT I2C 8DFN
TLV74310PDBVR
Texas Instruments
IC REG LINEAR 1V 300MA SOT23-5
CY9BF114RPMC-G-JNE2
Infineon Technologies
IC MCU 32BIT 288KB FLASH 120LQFP
2225WA101KAT1A\SB
KYOCERA AVX
CAP CER 100PF 2.5KV NP0 2225
ISL6506BCB-T
Renesas Electronics America Inc
IC MULTIPLE POWER CTRLR 8LEPSOIC
SMZJ3807B-E3/52
Vishay General Semiconductor - Diodes Division
DIODE ZENER 56V 1.5W DO214AA
LMK107BJ105KA-T
Taiyo Yuden
CAP CER 1UF 10V X5R 0603
5962-9475501MPA
Analog Devices Inc.
IC ADC 12BIT SRL 8CERDIP
74AC11086D
Texas Instruments
IC GATE XOR 4CH 2-INP 16SOIC
LTC1064-4CSW#TRPBF
Analog Devices Inc.
IC FILTER 100KHZ LOWPASS 16SOIC
FQP5N30
Fairchild Semiconductor
MOSFET N-CH 300V 5.4A TO220-3
74HC4052PW,118
Nexperia USA Inc.
IC SWITCH SP4TX2 150OHM 16TSSOP
744052100
Würth Elektronik
FIXED IND 10UH 1.1A 130 MOHM SMD
EPM7192EQI160-20
Intel
IC CPLD 192MC 20NS 160QFP
19-213/G6C-AP1Q2/3T
Everlight Electronics Co Ltd
LED SMD
1SS133M
Taiwan Semiconductor Corporation
DO-34, 90V, 0.15A, SWITCHING DIO
SI53340-B-GM
Skyworks Solutions Inc.
IC CLK BUFFER 2:4 1.25GHZ 16QFN -

DMC2400UV-7
Diodes Incorporated
MOSFET N/P-CH 20V SOT563
PIC24HJ64GP206-I/PT
Microchip Technology
IC MCU 16BIT 64KB FLASH 64TQFP
LM2904VDR2G
onsemi
IC OPAMP GP 2 CIRCUIT 8SOIC
1N4742A-T
Vishay General Semiconductor - Diodes Division
DIODE ZENER 12V 1.3W DO41
CD74HC366M96
Texas Instruments
IC BUFFER INVERT 6V 16SOIC
CY7C1019CV33-12ZXCT
Infineon Technologies
IC SRAM 1MBIT PARALLEL 32TSOP II
STM32F031C6T6
STMicroelectronics
IC MCU 32BIT 32KB FLASH 48LQFP
CGA5L2X7R1E225K160AA
TDK Corporation
CAP CER 2.2UF 25V X7R 1206
1734577-4
TE Connectivity AMP Connectors
CONN MOD JACK 8P8C VERT SHIELDED
1210ZC185JAT2A
KYOCERA AVX
CAP CER 1.8UF 10V X7R 1210
MT9196AP1
Microchip Technology
IC TELECOM INTERFACE 28PLCC
TMCMC1E106MTRF
Vishay Sprague
CAP TANT 10UF 20% 25V SMD
ADS8555SPMR
Texas Instruments
IC ADC 16BIT SAR 64LQFP
LMV721M7X
Texas Instruments
IC OPAMP GP 1 CIRCUIT SC70-5
QMK212BJ223KG-T
Taiyo Yuden
CAP CER 0.022UF 250V X5R 0805
GRM0336S1E8R6CD01D
Murata Electronics
CAP CER 8.6PF 25V S2H 0201
18121C564KAT2A
KYOCERA AVX
CAP CER 0.56UF 100V X7R 1812
MC34071ADR2G
onsemi
IC OPAMP GP 1 CIRCUIT 8SOIC